Un nuevo paradigma para la inteligencia robótica descentralizada
Durante décadas, los robots estaban restringidos a tareas muy específicas y repetitivas en entornos industriales perfectamente estructurados. Sin embargo, hoy la inteligencia artificial está transformando la robótica: ahora los robots pueden interpretar instrucciones humanas y adaptarse a situaciones cambiantes.
Vivimos el comienzo de una etapa de fuerte expansión: Citi calcula que para 2035 habrá 1,3 mil millones de robots operando en todo el mundo, con presencia cada vez mayor fuera de las fábricas, en hogares y sectores de servicios. Por su parte, Morgan Stanley prevé que el mercado de robótica humanoide alcance los 5 billones de dólares en 2050.
Aunque esta expansión abre oportunidades extraordinarias, también plantea retos de calado en cuanto a centralización, confianza, privacidad y escalabilidad. Las tecnologías Web3 aportan soluciones disruptivas, fomentando redes robóticas colaborativas, descentralizadas, verificables y respetuosas con la privacidad que abordan estos desafíos.
En esta entrega analizamos la evolución de la cadena de valor de la robótica con IA, con especial atención a los robots humanoides, y exploramos atractivas oportunidades que surgen de la convergencia entre IA, robótica y Web3.
Cadena de valor en la robótica con IA
La cadena de valor de la robótica con IA abarca cuatro capas esenciales: Hardware, Inteligencia, Datos y Agente. Cada una se sustenta en las demás y permite que los robots perciban, razonen y actúen en entornos reales complejos.
En los últimos años, la industria ha logrado avances sobresalientes en la capa de hardware, con empresas pioneras como Unitree y Figure AI. No obstante, persisten dificultades en las capas no relacionadas con hardware: escasez de datos de calidad, ausencia de modelos fundacionales generalizables, interoperabilidad limitada entre diferentes “cuerpos” robóticos y la necesidad de computación edge fiable. Por tanto, las mayores oportunidades actualmente se encuentran en las capas de Inteligencia, Datos y Agente.
Capa de Hardware: “El cuerpo”
Hoy es más sencillo que nunca desarrollar y desplegar “cuerpos robóticos” avanzados. En el mercado hay más de 100 modelos distintos de robots humanoides, como Optimus de Tesla, G1 de Unitree, Digit de Agility Robotics y Figure 02 de Figure AI.
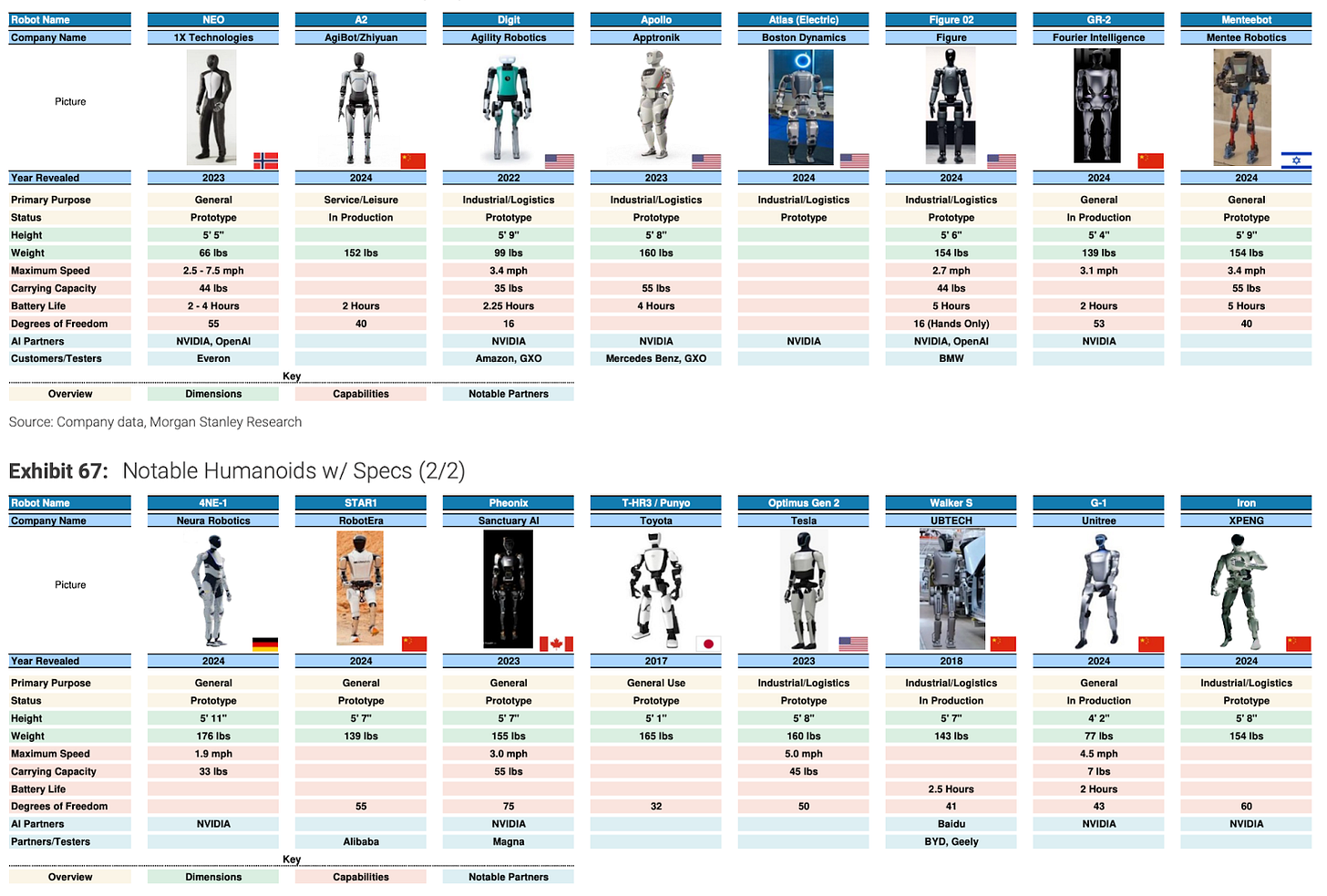
Fuente: Morgan Stanley, The Humanoid 100: Mapping the Humanoid Robot Value Chain.
Este progreso se nutre de mejoras en tres componentes clave:
- Actuadores: Los “músculos” del robot convierten órdenes digitales en movimientos precisos. Innovaciones como los motores eléctricos de alto rendimiento para movimientos rápidos y exactos, y los actuadores de elastómeros dieléctricos (DEA) para tareas delicadas, han elevado enormemente la destreza. Robots como Optimus Gen 2 de Tesla, con 22 grados de libertad (DoF), y el G1 de Unitree ya se acercan a la destreza humana y destacan por su movilidad.
Fuente: Últimos robots humanoides de Unitree, simulando un combate de boxeo en la WAIC 2025
Sensores: Los sensores avanzados permiten a los robots percibir e interpretar el entorno mediante visión, LIDAR/RADAR, tacto y audio. Estas tecnologías contribuyen a la navegación segura, la manipulación precisa y una mejor percepción contextual.
Computación embebida: CPUs, GPUs y aceleradores de IA integrados (TPUs, NPUs) procesan la entrada sensorial en tiempo real y ejecutan modelos de IA para la toma de decisiones autónoma. La conectividad fiable y de baja latencia posibilita la coordinación continua, y las arquitecturas edge-cloud híbridas permiten el uso combinado de recursos locales y en la nube para cargas computacionales exigentes.
Capa de Inteligencia: “El cerebro”
A medida que el hardware madura, la prioridad pasa al desarrollo de “cerebros robóticos”: modelos fundacionales robustos y avanzadas políticas de control.
Antes de incorporar IA, los robots se basaban en automatismos y movimientos preprogramados, sin capacidad de adaptación.
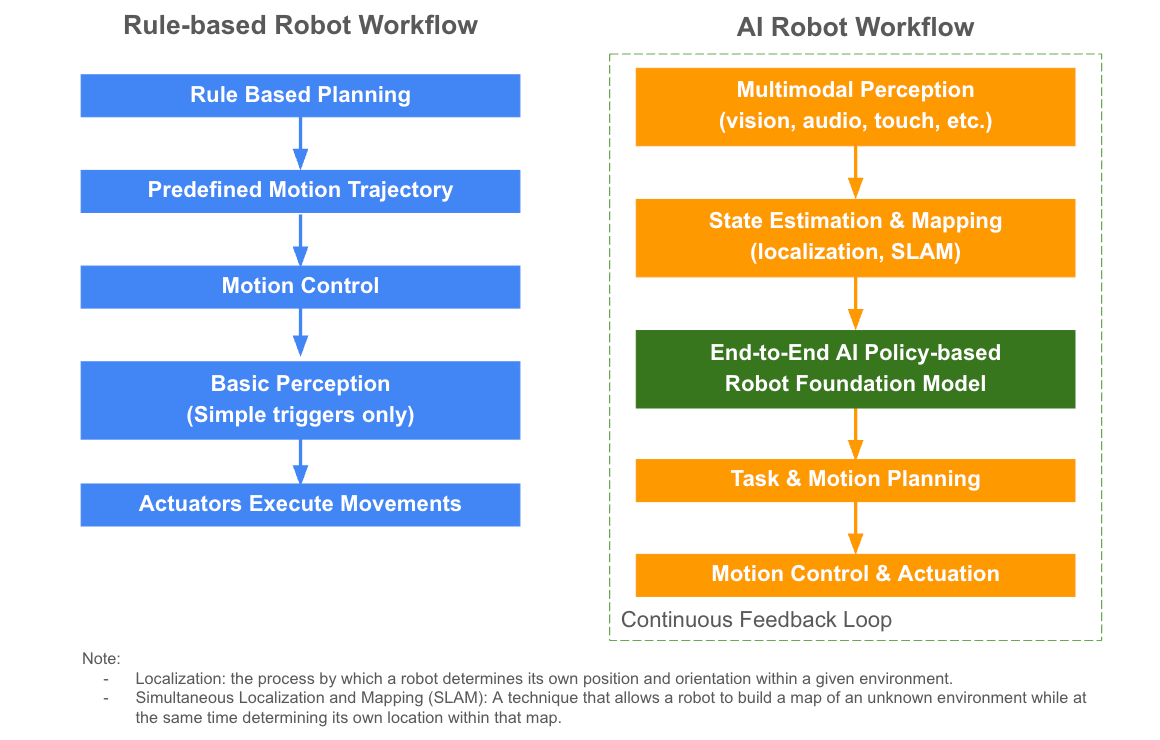
La integración de modelos fundacionales en robótica marca un hito, pero los grandes modelos de lenguaje (LLM) por sí solos no bastan: los robots deben percibir, razonar y actuar en entornos físicos dinámicos. Por eso, el sector desarrolla modelos fundacionales robóticos basados en políticas de principio a fin, permitiendo que los robots:
- Perciban: Procesen datos brutos y multimodales de sensores (visión, audio, tacto)
- Planifiquen: Estimen su estado, creen mapas del entorno e interpreten instrucciones complejas, conectando la percepción con la acción sin apenas intervención humana
Actúen: Generen planes y órdenes de movimiento para ejecución inmediata
Estos modelos aprenden “políticas” generales de interacción, gracias a las cuales los robots se adaptan a multitud de tareas y funcionan de forma más inteligente y autónoma. Los modelos avanzados incorporan retroalimentación continua, lo que permite a los robots aprender por experiencia y ganar flexibilidad ante situaciones dinámicas.
La arquitectura líder en modelos fundacionales robóticos hoy es el Vision-Language-Action Model (VLA). Estos modelos conectan información sensorial—especialmente visual y en lenguaje natural—directamente con las acciones del robot, habilitando respuestas precisas según lo que “ven” y “oyen”. Ejemplos destacados incluyen RT-2 de Google, Isaac GR00T N1 de NVIDIA y π0 de Physical Intelligence (π).
Para perfeccionarlos, se integran varios enfoques complementarios:
World Models: Desarrollan simulaciones internas del mundo físico para que los robots adquieran conductas complejas, anticipen resultados y planifiquen acciones. Google ha lanzado Genie 3, un modelo generalista capaz de crear una inusitada diversidad de entornos interactivos.
- Aprendizaje por refuerzo profundo: Permite que los robots aprendan por ensayo y error.
- Teleoperación: Facilita el control remoto y la generación de datos de entrenamiento.
Aprendizaje por demostración (LfD)/Imitación: Enseña a los robots nuevas destrezas imitando acciones humanas.
A continuación, una visión general de cómo estos métodos contribuyen a los modelos fundacionales robóticos.
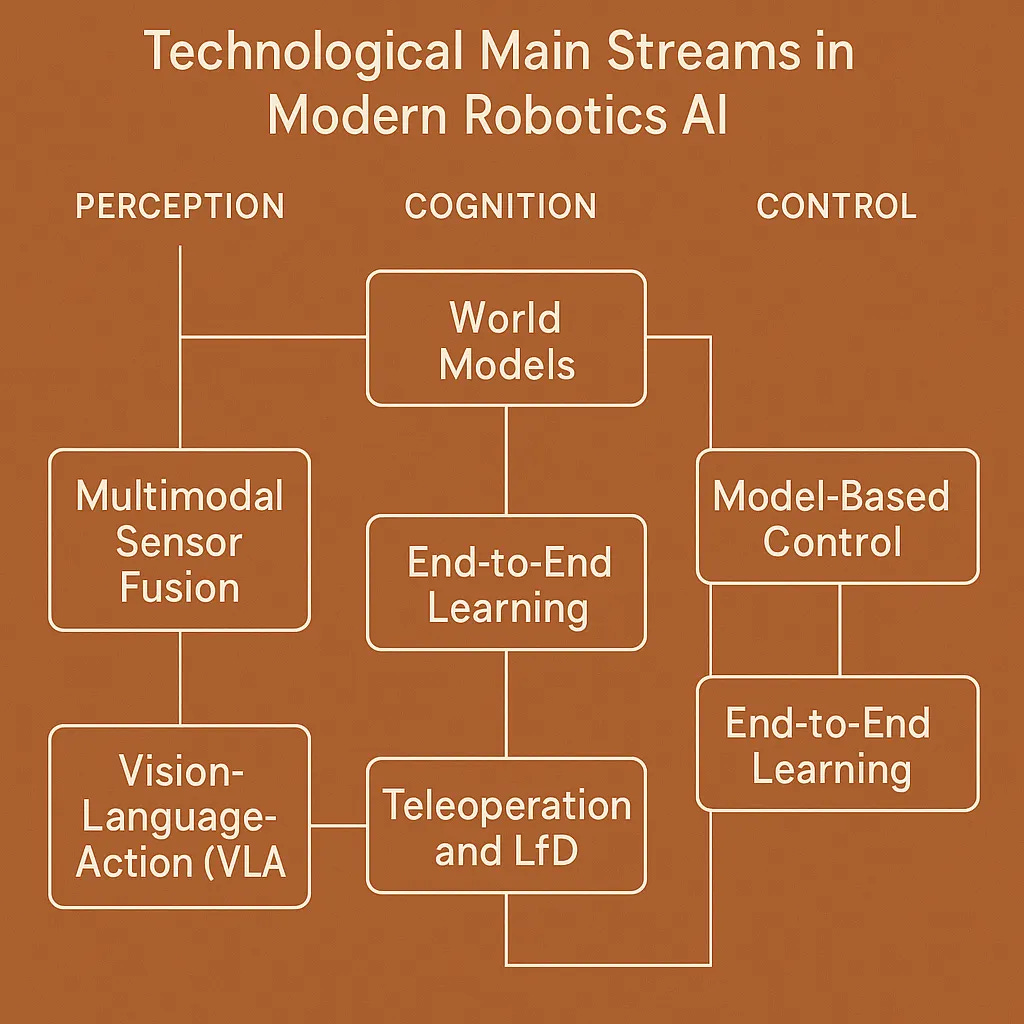
Fuente: World models: the physical intelligence core driving us toward AGI
Los grandes avances open source—como π0 de Physical Intelligence (π) y Isaac GR00T N1 de NVIDIA—suponen un hito, pero la mayoría de modelos fundacionales siguen centralizados y cerrados. Empresas como Covariant, Tesla y otras mantienen sus códigos y datos en propiedad, al no existir aún suficientes incentivos para compartirlos.
Esta falta de transparencia dificulta la colaboración e interoperabilidad entre plataformas robóticas, y subraya la necesidad de compartir modelos de manera segura y verificable, fijar estándares comunitarios en blockchain e implementar capas de interoperabilidad entre distintas morfologías. Este planteamiento fomentaría la confianza, cooperación y el desarrollo robusto del sector.
Capa de Datos: El “conocimiento” del cerebro robótico
Los datos robustos para robótica se sustentan en tres pilares: cantidad, calidad y diversidad.
Actualmente, los conjuntos de datos disponibles son insuficientes. Por mencionar una referencia: GPT-3 de OpenAI empleó 300 mil millones de tokens en su formación, mientras que el mayor dataset open source en robótica—Open X-Embodiment—solo recoge algo más de 1 millón de trayectorias reales de robots en 22 tipos distintos. El salto de magnitud necesario para una generalización sólida es enorme.
Algunos enfoques propietarios, como las fábricas de datos de Tesla, donde operadores emplean trajes de captura de movimiento para generar datos de entrenamiento, ayudan a reunir movimientos auténticos, pero resultan costosos, poco diversos y difíciles de escalar.
Para superar estos límites, la robótica aprovecha tres fuentes clave de datos:
- Datos de Internet: Son extensos y escalables, pero sobre todo observacionales y carentes de señales sensoriomotoras. Preentrenar grandes modelos visión-lenguaje (p. ej., GPT-4V, Gemini) con datos de Internet aporta priors semánticos y visuales valiosos. La anotación de vídeos con etiquetas cinemáticas convierte las grabaciones en material útil para entrenamiento.
- Datos sintéticos: En simulación se generan datos sintéticos para realizar pruebas rápidas y abordar escenarios diversos, pero no cubren la complejidad del mundo real—lo que se conoce como la “brecha sim-to-real”. Los investigadores recurren a la adaptación de dominio (aumentos de datos, aleatorización, aprendizaje adversarial) y a estrategias de transferencia sim-to-real, refinando los modelos mediante pruebas y ajustes con datos reales.
Datos reales: Aunque son escasos y costosos, resultan indispensables para aterrizar los modelos y superar el salto entre simulación y realidad. Los mejores datos incluyen vistas egocéntricas (en primer plano, lo que el robot “ve” durante las tareas) y movimiento registrado, que documenta la ejecución precisa de acciones. Se recopilan mediante demostraciones humanas, teleoperación con VR, sistemas de captura de movimientos y enseñanza kinestésica, garantizando el aprendizaje en base a ejemplos reales y veraces.
La investigación señala que sumar datos de internet, reales y sintéticos al entrenamiento mejora la eficiencia y la robustez de los modelos de manera notable frente a los algoritmos que emplean solo una fuente.
Por otra parte, incrementar la cantidad de datos es positivo, pero la diversidad es aún más decisiva para generalizar tareas y adaptarlas a nuevas morfologías robóticas. Para lograrlo, resultan clave plataformas abiertas y la colaboración en la creación de datasets que integren diferentes “embodiments” y faciliten modelos fundacionales robustos.
Capa de Agente: El “Agente físico de IA”
El salto hacia agentes físicos de IA—robots autónomos que actúan en la realidad—se acelera, apoyado en modelos optimizados, aprendizaje continuo y adaptación a la morfología concreta de cada robot.
Entre las oportunidades emergentes para impulsar el avance de estos agentes destacan:
- Aprendizaje continuo e infraestructura adaptativa: Sistemas que garanticen la mejora constante a través del feedback en tiempo real y el aprendizaje compartido en despliegues reales
- Economías de agentes autónomos: Robots operando como agentes económicos independientes, capaces de intercambiar recursos (computación, datos de sensores) en mercados robot-robot y generar ingresos con servicios tokenizados
- Sistemas multiagente: Plataformas y algoritmos que permitan coordinar, colaborar y optimizar el comportamiento conjunto de flotas robóticas
La convergencia de IA, robótica y Web3: Un mercado disruptivo
A medida que la robótica con IA pasa de la experimentación al mundo real, persisten cuellos de botella como los silos de datos/modelos centralizados, la escasez de confianza y trazabilidad, las restricciones de privacidad y cumplimiento normativo y la baja interoperabilidad, que dificultan la innovación y el crecimiento de ecosistemas robustos y rentables.
Problemáticas clave en robótica con IA
Silos centralizados de datos y modelos
Los robots demandan conjuntos de datos inmensos y variados. Sin embargo, el desarrollo y gestión de estos recursos sigue siendo centralizado, fragmentado y costoso, generando sistemas poco flexibles. Cuando se despliegan en entornos reales, a menudo tienen un rendimiento insuficiente por la baja diversidad de datos y una escasa robustez de los modelos.
Confianza, trazabilidad y fiabilidad
La falta de registros transparentes y auditables sobre orígenes de datos, entrenamiento de modelos y operativa de robots debilita la confianza y la responsabilidad, lo que supone un gran obstáculo para usuarios, reguladores y empresas.
Privacidad, seguridad y cumplimiento normativo
Las aplicaciones sensibles—sanidad, robótica doméstica—exigen protección estricta de la privacidad y cumplimiento de normativas, especialmente en Europa (GDPR). Las infraestructuras centralizadas suelen incapaces de garantizar colaboración segura y respetuosa con la privacidad, restringiendo el intercambio de datos e impidiendo la innovación en sectores regulados.
Escalabilidad e interoperabilidad
Los sistemas robóticos enfrentan grandes obstáculos para compartir recursos, aprender de forma colaborativa e integrarse con diferentes plataformas y morfologías. Estas carencias restan potencial a los efectos de red y dificultan la transferencia ágil de funciones entre distintos robots.
IA Robótica x Web3: Soluciones estructurales y oportunidades para el inversor
Las tecnologías Web3 atacan de raíz estas cuestiones, posibilitando redes colaborativas, descentralizadas, verificables y que protegen la privacidad. La convergencia abre nuevas áreas de negocio e inversión:
Desarrollo colaborativo democratizado: Redes incentivadas en las que los robots comparten datos y desarrollan modelos y agentes inteligentes conjuntamente
- Trazabilidad y responsabilidad verificables: Blockchain garantiza registros inmutables sobre la procedencia de datos/modelos, identidades robóticas y actividad operativa, base de la confianza y el cumplimiento.
- Colaboración con protección de la privacidad: Soluciones criptográficas avanzadas permiten entrenar modelos y compartir información sin revelar datos sensibles.
- Gobernanza abierta y participativa: Las organizaciones autónomas descentralizadas (DAO) crean reglas y políticas en blockchain para supervisar y orientar la actividad robótica con transparencia.
- Interoperabilidad cross-embodiment: Marcos abiertos basados en blockchain facilitan la coordinación entre plataformas robóticas diversas, reducen costes y aceleran la transferencia de capacidades.
- Economías de agentes autónomos: Las infraestructuras Web3 permiten que los robots actúen como agentes económicos independientes, realizando transacciones peer-to-peer, negociando y participando en mercados tokenizados sin mediación humana.
Redes físicas descentralizadas (DePIN): El intercambio peer-to-peer de recursos (computación, sensorización, almacenamiento, conectividad) basado en blockchain multiplica la escalabilidad y resiliencia de redes robóticas.
A continuación, algunos proyectos destacados que ilustran la innovación y dinamismo de este sector. Recuerda: se trata de información divulgativa, no constituyen asesoramiento financiero.
Desarrollo descentralizado de datos y modelos
Las plataformas Web3 democratizan estos procesos con incentivos a los colaboradores—trajes de captura de movimiento, sensores, subidas visuales, anotación manual o generación de datos sintéticos para simulación y modelado. Esto permite construir datasets y modelos más ricos y representativos, lo que supera la capacidad de cualquier empresa individual. Los marcos descentralizados amplían la cobertura de casos límite, clave para la robótica en entornos imprevisibles.
Ejemplo:
Frodobots: Protocolo para recopilar datasets reales mediante juegos robóticos. Han lanzado Earth Rovers, un robot para aceras y un juego global “Drive to Earn”. Así han creado el FrodoBots 2K Dataset: colección de grabaciones de cámara, datos GPS, audio y control humano, con más de 2 000 horas de robots teleoperados en 10 ciudades.
- BitRobot: plataforma cripto-incentivada desarrollada por FrodoBots Lab y Protocol Labs, sobre Solana, con arquitectura de subredes. Promueve la colaboración global y la innovación open source en robótica/IA. Cada subred es un reto abierto que recompensa con tokens a quienes aporten modelos o datos.
- Reborn Network: Infraestructura base para el ecosistema abierto de robots AGI. Ofrece el traje Rebocap para grabar y monetizar movimientos reales, clave en la generación de datasets abiertos para el avance en robótica humanoide compleja.
PrismaX: Infraestructura descentralizada que asegura diversidad y autenticidad de datos a escala global, con mecanismos de validación e incentivos para grandes datasets visuales, facilitando el crecimiento de la robótica.
Prueba de procedencia y fiabilidad
Blockchain proporciona transparencia y responsabilidad integral al ecosistema robótico. Verifica la procedencia de datos y modelos, autentifica identidades y ubicaciones, y mantiene registros claros de actividad y colaboración. Además, el sistema colaborativo de verificación, reputación en cadena y validación por staking salvaguarda la calidad de los datos frente a aportaciones fraudulentas o de baja calidad.
Ejemplo:
OpenLedger: Infraestructura AI-blockchain para entrenar y desplegar modelos con datasets propiedad de la comunidad. Recompensa a los aportantes gracias a su sistema Proof of Attribution.
Propiedad, licencias y monetización tokenizadas
Herramientas nativas de Web3 facilitan la concesión de licencias tokenizadas sobre datos, capacidades robóticas, modelos y agentes inteligentes. Los colaboradores pueden poner condiciones de uso en sus activos gracias a smart contracts y recibir automáticamente regalías cuando estos se moneticen o reutilicen. Así se promueven mercados abiertos, justos y transparentes para los datos y modelos en robótica.
Ejemplo:
Poseidon: Capa de datos descentralizada basada en Story Protocol centrado en la propiedad intelectual y desarrollada por el equipo de Story, para proveer datos licenciados legalmente para IA.
Soluciones para la privacidad
Los datos más valiosos—desde hospitales, hoteles y hogares—no se pueden obtener de fuentes públicas, pero contienen información fundamental para mejorar los modelos fundacionales. Convertir estos datos privados en activos en blockchain mediante tecnologías criptográficas permite rastrearlos, modularlos y monetizarlos sin perder privacidad. Tecnologías como los entornos de ejecución confiable (TEE) y las pruebas de conocimiento cero (ZKP) posibilitan el procesamiento seguro y la verificación de resultados sin exponer los datos. Así es posible entrenar IA con datos sensibles y distribuidos, respetando la privacidad y la legalidad.
Ejemplo:
Phala Network: Permite a los desarrolladores ejecutar aplicaciones en TEE seguros para el procesamiento confidencial de IA y datos.
Gobernanza abierta y verificable
El entrenamiento robótico se basa a menudo en sistemas cerrados y poco transparentes. La gobernanza abierta y verificable es fundamental para minimizar riesgos y generar confianza entre usuarios, reguladores y empresas. La tecnología Web3 habilita la supervisión comunitaria en blockchain y el desarrollo colaborativo de inteligencia robótica open source.
Ejemplo:
Openmind: Stack software nativo de IA abierta que permite a los robots pensar, aprender y cooperar. Proponen el estándar ERC7777 para establecer un ecosistema robótico seguro, transparente y escalable. Define interfaces estandarizadas para la gestión de identidades humanas y robóticas, aplicación de reglas y gobernanza sobre participación y derechos.
Reflexión final
Si miramos al futuro, la convergencia entre IA, robótica y Web3 inaugura una nueva era de sistemas autónomos colaborativos a gran escala. Los avances en hardware, junto con los próximos 3–5 años de desarrollo en modelos de IA y datasets reales coordinados de forma descentralizada, serán decisivos. La aparición de agentes especializados en sectores como hostelería y logística augura nuevas oportunidades de negocio.
Ahora bien, el entusiasmo por la confluencia IA-robótica-cripto no oculta los retos: diseñar incentivos justos y efectivos sigue siendo complejo y debe evolucionar para recompensar correctamente a los colaboradores y evitar abusos. La integración técnica requiere soluciones escalables y fiables para unir distintas morfologías robóticas. Las soluciones de privacidad deben responder con garantías, especialmente cuando haya datos sensibles implicados. Además, el marco regulatorio se transforma rápidamente y exige una gestión cuidadosa para asegurar el cumplimiento en cada jurisdicción. Enfrentar estos riesgos y generar retornos sostenibles es clave para el éxito y la adopción global.
Participa y mantente al día—juntos podemos impulsar el progreso y aprovechar todo el potencial de este mercado en auge.
La innovación robótica es un camino que merece recorrerse en compañía
Por último, agradezco especialmente a Chain of Thought y su Robotics & The Age of Physical AI por sus aportaciones clave para esta investigación.
Aviso legal:
- Este artículo se publica con permiso de [merakiki.eth]. Todos los derechos pertenecen al autor original [@merakikieth">merakiki]. Si tienes alguna objeción sobre esta publicación, ponte en contacto con el equipo de Gate Learn y lo gestionarán con prontitud.
- Exención de responsabilidad: Las opiniones recogidas son exclusivamente del autor y no constituyen asesoramiento de inversión.
- Las traducciones a otros idiomas han sido realizadas por el equipo de Gate Learn. Salvo aviso expreso, está prohibido copiar, distribuir o plagiar los contenidos traducidos.
Compartir


Artículos relacionados
¿Qué es HyperGPT? Todo lo que necesitas saber sobre HGPT

¿Qué son las narrativas cripto? Principales narrativas para 2025 (ACTUALIZADO)
¿Qué plataforma construye los mejores agentes de IA? Probamos ChatGPT, Claude, Gemini y más

El Auge de GOAT: La Especulación y Preocupaciones detrás de los Memes de IA | Una Revisión 100x

Protocolo Virtuals: Tokenizando Agentes de IA
