Нова парадигма децентралізованого роботизованого інтелекту
Упродовж багатьох років роботи залишалися вузькоспеціалізованими, виконуючи переважно повторювані завдання у промислових умовах. Нині штучний інтелект докорінно змінює робототехніку, дозволяючи роботам розуміти й виконувати команди користувачів, а також швидко пристосовуватися до змінного середовища.
Сьогодні ми спостерігаємо початок нової ери динамічного розвитку: Citi прогнозує, що до 2035 року 1,3 мільярда роботів діятимуть по всьому світу, виходячи за межі виробництва й активно проникаючи у приватні помешкання та сферу послуг. За оцінкою Morgan Stanley, ринок гуманоїдної робототехніки може досягти 5 трильйонів доларів США до 2050 року.
Швидке розширення створює величезний потенціал для бізнесу, але й породжує важливі виклики — централізацію, питання довіри, захисту приватності, масштабованості. Вирішити ці проблеми дозволяють технології Web3, що забезпечують децентралізовані, перевірені, конфіденційні й кооперативні роботизовані мережі.
У цьому матеріалі ми аналізуємо еволюцію ланцюга створення вартості AI-робототехніки з акцентом на гуманоїдних роботах, а також презентуємо цікаві можливості, які відкриваються завдяки синергії AI-робототехніки та Web3.
Структура ланцюга створення вартості AI-робототехніки
Сучасний ланцюг створення вартості AI-робототехніки складається з чотирьох ключових рівнів: обладнання, інтелект, дані та агент. Кожен рівень є основою для наступного й розкриває потенціал роботів — сприймати інформацію, мислити, діяти у складних реальних сценаріях.
За останні роки галузь досягла істотного прогресу на апаратному рівні, що демонструють лідери — Unitree та Figure AI. Водночас залишаються важливі бар’єри поза «залізом»: нестача якісних датасетів, відсутність універсальних фундаментальних моделей, низька сумісність між різними конструкціями та потреба у надійних edge-комп’ютерах. Саме у сферах інтелекту, даних та агентів нині зосереджені найбільші інноваційні можливості.
Апаратний рівень: «Тіло»
Зараз створення й запуск сучасних «тіл» роботів стало простішим, ніж будь-коли. На ринку доступно понад 100 типів гуманоїдних роботів, зокрема Tesla Optimus, Unitree G1, Digit від Agility Robotics і Figure 02 від Figure AI.
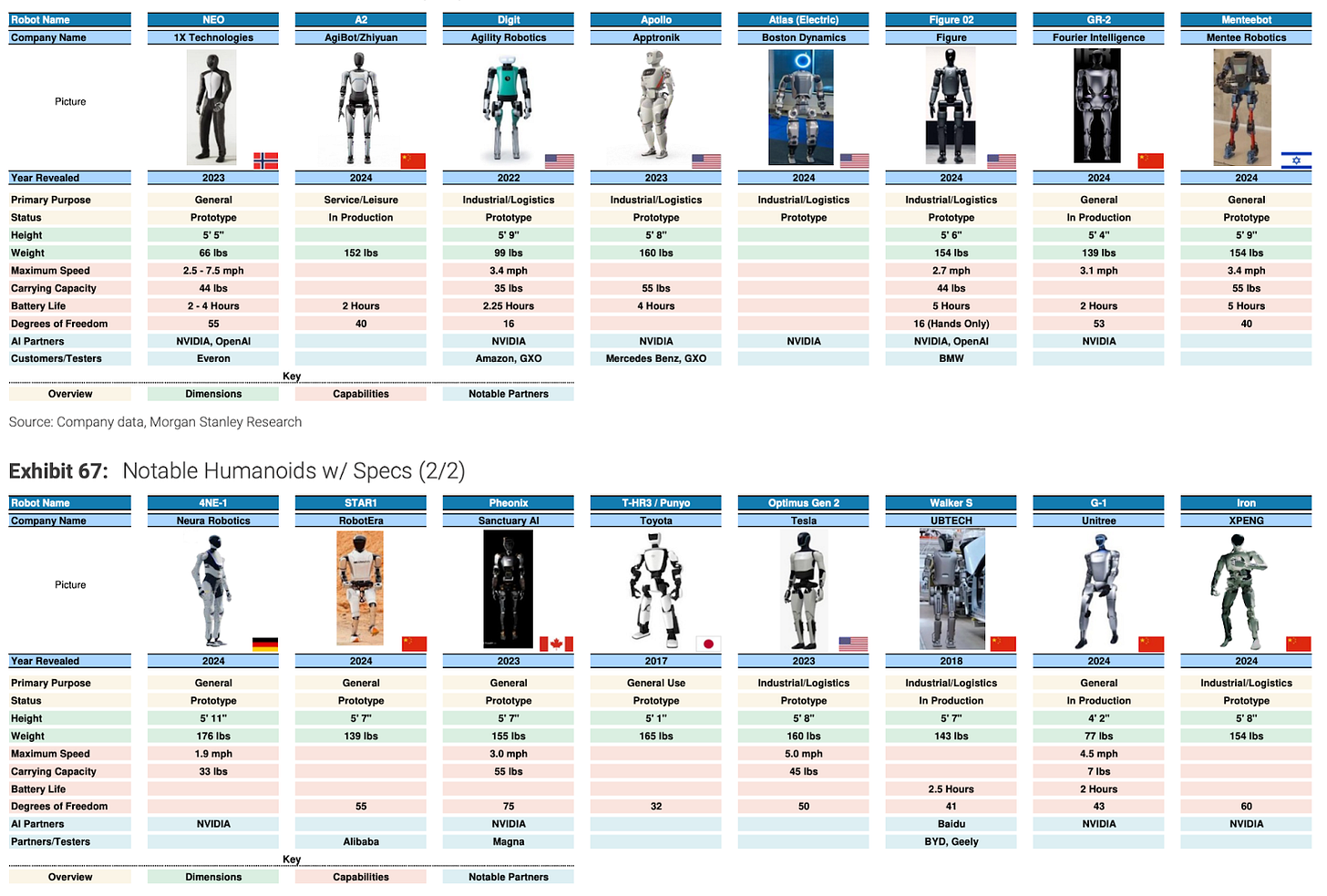
Джерело: Morgan Stanley, The Humanoid 100: Mapping the Humanoid Robot Value Chain.
Основою змін стали три ключові компоненти:
- Приводи: Це «м’язи» робота, які трансформують цифрові команди у точні рухи. Серед інновацій — потужні електродвигуни для швидких і точних маніпуляцій, діелектричні еластомерні приводи (DEAs) для делікатних операцій — усе це разом підвищило спритність пристроїв. Так, Optimus Gen 2 від Tesla із 22 ступенями свободи (DoF) та G1 від Unitree демонструють майже людську маневровість і високу мобільність.
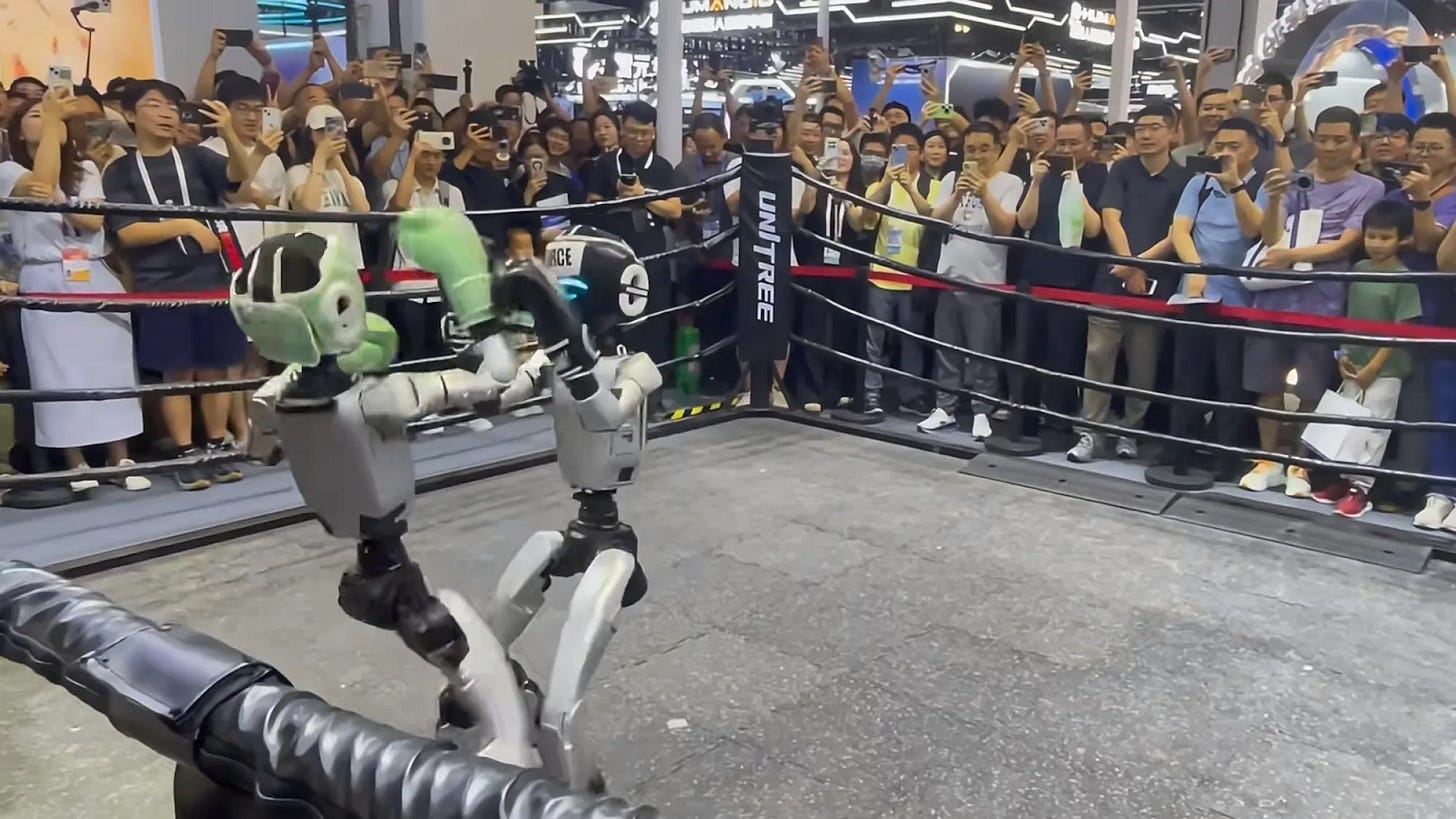
Джерело: гуманоїдні роботи Unitree на боксерському шоу WAIC 2025
Датчики: Сучасні сенсори забезпечують роботам можливість бачити, чути, розпізнавати тактильні й просторові сигнали (зір, LIDAR/RADAR, дотик, аудіо), підтримуючи безпечну навігацію, точні рухи й повну ситуаційну обізнаність.
Устрої (CPU, GPU, AI-акселератори: TPU, NPU) аналізують дані сенсорів у реальному часі та запускають AI-моделі для автономного прийняття рішень. Надійне низьколатентне з’єднання забезпечує синхронну координацію, а гібридна edge–cloud архітектура дозволяє роботам делегувати складні обчислення у хмару.
Інтелектуальний рівень: «Мозок»
Поки hardware розвивається, фокус зсувається на створення «мозку» робота — фундаментальних моделей та прогресивних політик керування.
До появи AI інтеграції роботи діяли за заздалегідь запрограмованими правилами — їм бракувало адаптивності й глибокого інтелекту.
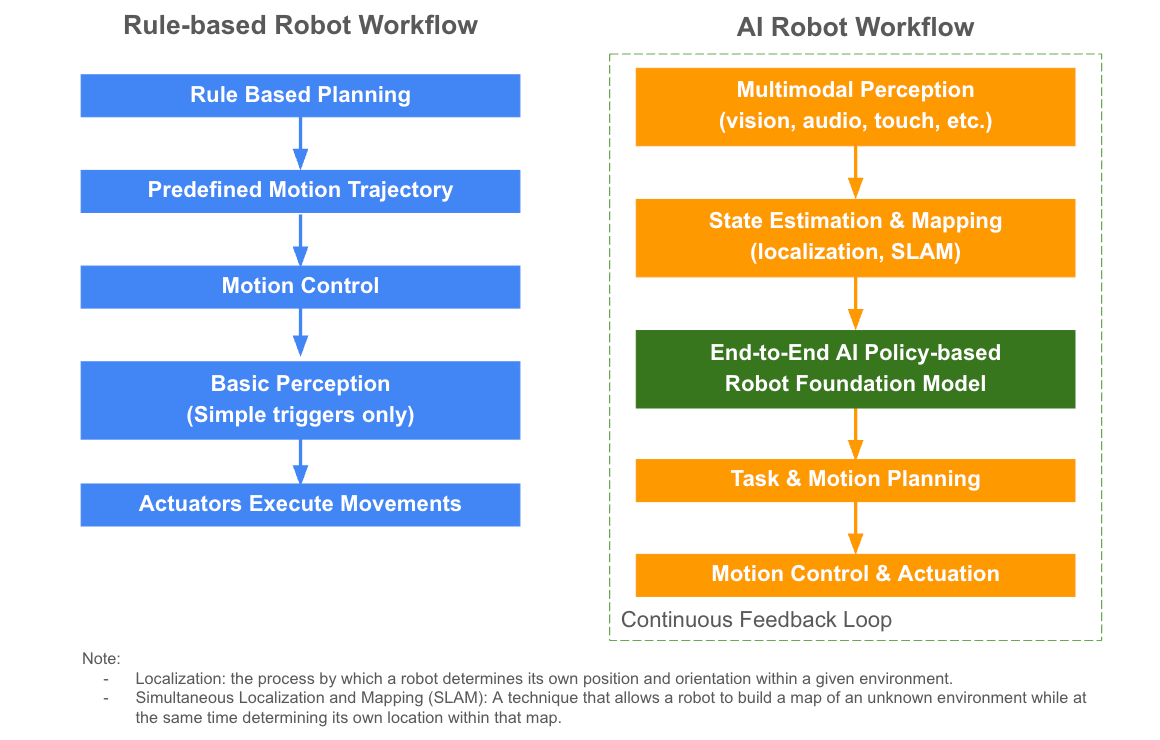
Сьогодні у робототехніку впроваджують фундаментальні моделі. Втім, універсальні великі мовні моделі (LLMs) не забезпечують достатньої гнучкості: роботи повинні сприймати, аналізувати й діяти у складному та змінному фізичному світі. Сфера розробляє наскрізні, політично-орієнтовані базові моделі, щоб роботи могли:
- Сприймати: Обробляти різноманітні необроблені мультимодальні сенсорні дані — зображення, звук, дотик
- Планувати: Оцінювати власний стан, будувати карту навколишнього середовища, інтерпретувати складні інструкції — швидко переводити сприйняття у дію мінімальним ручним налаштуванням
Діяти: Формувати плани руху, видавати контрольні команди для виконання у реальному часі
Такі моделі засвоюють загальні "політики" взаємодії зі світом, що дозволяє роботам швидко пристосовуватися до різних завдань і діяти більш інтелектуально та автономно. Прогресивні моделі застосовують постійний зворотний зв’язок, даючи змогу роботам навчатися на власному досвіді і посилювати гнучкість у мінливих умовах.
Лідером серед фундаментальних архітектур робототехнічних моделей є Vision-Language-Action Model (VLA). VLA напряму пов’язують сенсорні сигнали — зображення та команди природною мовою — із діями робота, дозволяючи адаптувати його поведінку відповідно до того, що він «бачить» і «чув». Провідними прикладами є Google RT-2, NVIDIA Isaac GR00T N1, π0 від Physical Intelligence (π).
Для їхнього вдосконалення об’єднують різні доповнювальні підходи:
World Models: Внутрішні симуляції фізичного середовища дозволяють роботам навчатися складній поведінці, прогнозувати наслідки, планувати дії. Яскравий приклад — нещодавній запуск Google Genie 3, універсальної моделі світу, здатної створити небачене розмаїття інтерактивних середовищ.
- Глибоке навчання з підкріпленням: Допомагає роботам освоювати поведінку методом проб і помилок.
- Телеоперація: Дає можливість дистанційного керування та створює навчальні дані.
Навчання за демонстраціями (LfD) / імітаційне навчання: Роботи засвоюють нові навички, повторюючи дії людини.
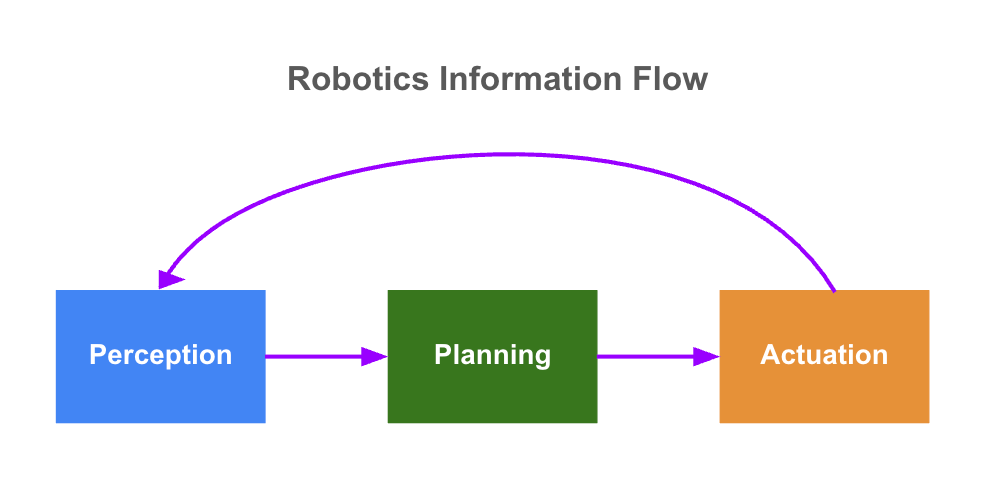
Нижче наведено схематичне зображення того, як ці підходи формують фундаментальні моделі робототехніки.
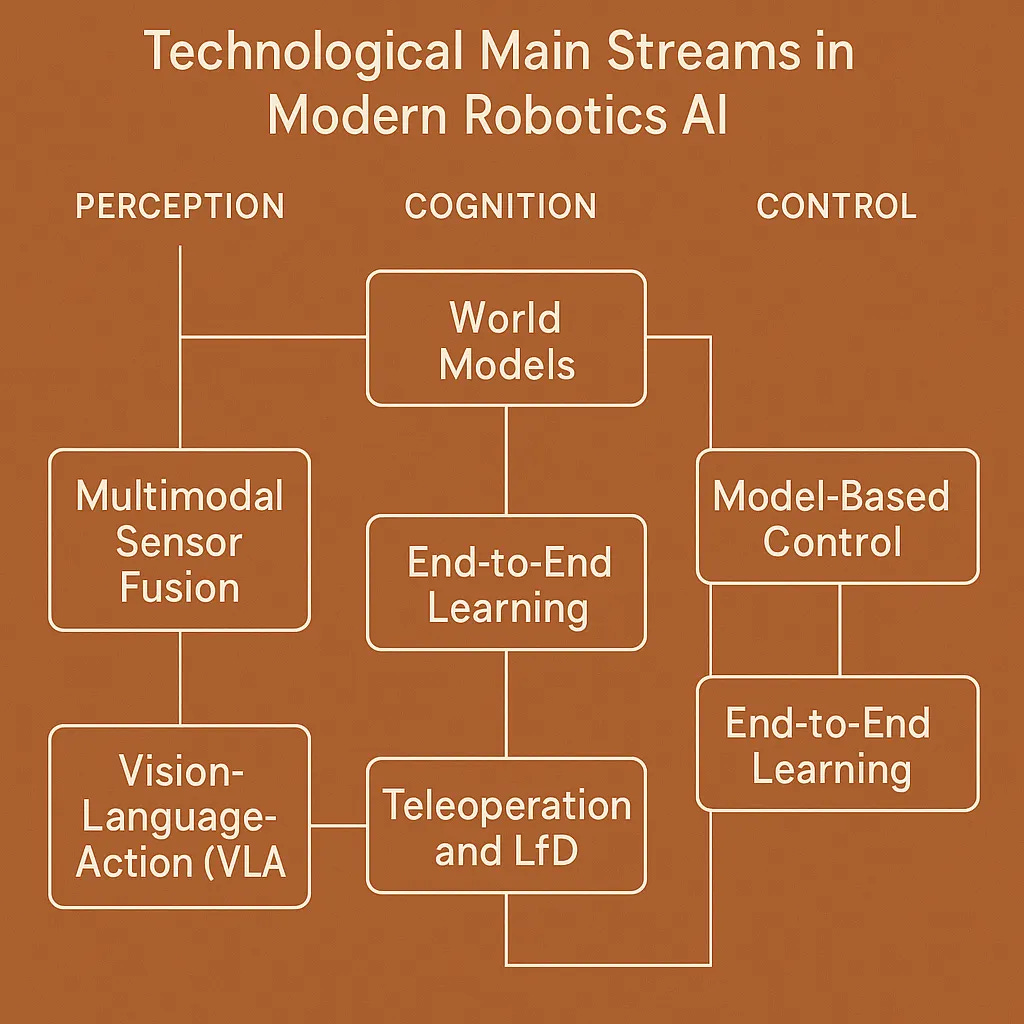
Джерело: World models: the physical intelligence core driving us toward AGI
Останні відкриті розробки — зокрема π0 від Physical Intelligence (π) та NVIDIA Isaac GR00T N1 — є знаковим проривом для галузі. Однак більшість фундаментальних робототехнічних моделей досі залишаються централізованими й закритими. Компанії, такі як Covariant, Tesla, та інші, не розкривають вихідний код і датасети через брак мотивацій до відкритості.
Відсутність прозорості гальмує співпрацю й сумісність між платформами — тому критично важливим є створення безпечних відкритих механізмів обміну моделями, спільно керованих стандартів на блокчейні, крос-інтероперабельності між різними платформами. Це підвищить довіру, сприятиме кооперації й сталому розвитку галузі.
Дані: «Знання» для мозку
Якісні робототехнічні датасети базуються на трьох ключових принципах: достатній кількості, високій якості та різноманітті.
Попри прогрес, поточні робототехнічні датасети залишаються недостатніми для масштабного розвитку. Для прикладу, OpenAI GPT-3 навчалась на 300 мільярдах токенів, а найбільший відкритий датасет Open X-Embodiment охоплює трохи більше 1 мільйона реальних траєкторій для 22 типів роботів — на декілька порядків менше необхідного для надійної генералізації.
Приватні підходи — наприклад, використання фабрик даних Tesla, де працівники у motion capture-костюмах створюють навчальні датасети — дозволяють збирати більше реальних даних руху. Однак це дорого, мало різноманітно й складно для масштабування.
Щоб вирішити цю проблему, сфера робототехніки використовує три основних джерела:
- Дані з Інтернету: Швидко масштабуються; переважно спостережні, не містять сенсомоторних сигналів. Попереднє навчання великих vision-language моделей (GPT-4V, Gemini) на інтернет-даних формує корисні семантичні та візуальні патерни. Додавання кінематичних відміток до відео трансформує їх у придатні для навчання дані.
- Синтетичні дані: Формуються у симуляціях, дають змогу швидко тестувати моделі в різних ситуаціях; цей підхід не може повністю врахувати реальну складність (ефект sim-to-real gap). Для вирішення цього залучають доменну адаптацію (аугментація, рандомізація, змагальне навчання), а також ітеративне тонке налаштування на основі реальних даних.
Реальні дані: Хоч їх обсяг обмежений, а збір дорогий, такі дані критично потрібні для коректного навчання моделей і подолання розриву між симуляцією й впровадженням. Якісні набори містять відео від першої особи (що «бачить» робот) і рухові дані — останні отримують за допомогою людських демонстрацій або телеоперації у VR, через motion capture чи кінестетичне навчання, забезпечуючи моделі достовірними прикладами.
Дослідження підтверджують: поєднання інтернет-даних, реальних і синтетичних джерел у тренуванні роботів дає кращі результати й стійкість моделей, ніж використання одного джерела.
Збільшення обсягу даних важливе, проте ще важливіше — різноманіття, що забезпечує універсальність для нових завдань і конструкцій роботів. Досягти цього можна шляхом відкритих платформ та спільного обміну, включаючи створення крос-платформних датасетів для потужних фундаментальних моделей.
Агентний рівень: «Фізичний AI агент»
Інновації у сфері автономних роботів — фізичних AI-агентів — набирають обертів. Їх розвиток залежить від точних налаштувань моделей, постійного навчання та адаптації під конкретну конструкцію пристрою.
Серед перспективних тенденцій, що стимулюють прогрес AI-агентів:
- Безперервне навчання та адаптивна інфраструктура: системи, що дозволяють роботам постійно вдосконалюватися через зворотний зв’язок і спільний досвід під час роботи
- Економіки автономних агентів: роботи можуть виступати незалежними економічними агентами — обмінюватися ресурсами (обчислення, дані сенсорів) на спеціалізованих ринках, отримуючи токенізований дохід
- Багатоагентні системи: алгоритми та платформи нового покоління, що дозволяють флотам роботів координувати дії, працювати разом і підвищувати загальну ефективність
Синергія AI-робототехніки та Web3: новий ринок для бізнесу
Після переходу AI-робототехніки з дослідницької фази у реальні задачі, низка принципових вразливостей — централізовані сховища даних і моделей, проблеми довіри, розриви приватності й складність масштабування — гальмують інновації й стримують розвиток стійкої ринкової екосистеми роботів.
Головні виклики AI-робототехніки
Централізовані сховища даних і моделей
Роботам потрібні об’ємні різноманітні датасети, але їхнє збирання й розробка нині є централізованими, дорогими й фрагментованими, що породжує неадаптивні ізольовані системи. У змінних реальних умовах роботи втрачають ефективність через нестачу даних і слабку стійкість моделей.
Довіра, прозорість і надійність
Відсутність аудиторських записів щодо походження даних, навчання моделей і роботи роботів підриває довіру та відповідальність — це стримує користувачів, регуляторів і бізнес-сектор.
Приватність, безпека й відповідність
Чутливі сфери — медицина, домашня робототехніка — потребують суворого захисту даних та дотримання норм, як-от GDPR у Європі. Централізовані рішення не забезпечують безпечного й конфіденційного співробітництва в AI, обмежуючи обмін даними й гальмуючи інновації у регульованих сферах.
Масштабованість та сумісність
Роботизованим системам складно колективно використовувати ресурси, навчатися разом й інтегруватися між різними платформами і конструкціями. Це роздрібнює мережу й сповільнює передачу навичок між роботами.
AI x Web3: структурні рішення та нові можливості для інвестицій
Технології Web3 вирішують ці проблеми — створюючи децентралізовані, перевірені, конфіденційні й кооперативні мережі роботів. Це відкриває нові бізнес-ніші:
Демократизована колективна розробка: мотиваційні мережі, де роботи обмінюються даними, створюють моделі та розвивають інтелектуальних агентів спільно
- Верифікована прозорість і відповідальність: блокчейн-фундамент гарантує незмінність записів щодо походження даних і моделей, ідентичності роботів, історії операцій — це критично для довіри й відповідності.
- Конфіденційна співпраця: сучасна криптографія дає змогу роботам спільно навчати моделі й обмінюватися інсайтами без ризику розкриття приватних чи конфіденційних даних
- Громадське управління: децентралізовані автономні організації (DAO) запроваджують прозорі, інклюзивні ончейн-правила й політики для регулювання робототехнічних мереж
- Крос-платформна сумісність: відкриті блокчейн-архітектури забезпечують синхронну взаємодію між різними робототехнічними платформами, здешевлюючи розробку й прискорюючи передачу знань
- Економіки автономних агентів: інфраструктура Web3 надає роботам статус самостійних економічних агентів, що здійснюють peer-to-peer транзакції, ведуть переговори й працюють у токенізованих екосистемах без участі людини
Децентралізовані фізичні мережі (DePIN): блокчейн забезпечує peer-to-peer обмін обчислювальними, сенсорними, сховищними й мережевими ресурсами, підвищуючи гнучкість і стійкість екосистем роботів
Нижче — приклади нових проектів, які задають тренди у галузі. Звертаємо увагу: інформація наведена виключно з ознайомлювальною метою та не є інвестиційною порадою.
Децентралізована розробка даних і моделей
Web3-платформи стимулюють розвиток, мотивуючи учасників датасетів — від motion capture, обміну сенсорами, завантаження зображень, анотацій до генерації синтетичних даних для симуляції та навчання. Це дає змогу створювати більш різноманітні, глибокі й репрезентативні датасети та моделі, ніж може одна компанія. Децентралізовані фреймворки також покращують охоплення edge-сценаріїв, що особливо важливо для роботів у непередбачуваних умовах.
Приклад:
Frodobots: Протокол для краудсорсингу реальних даних через ігри з роботами. Проект запустив Earth Rovers — тротуарний робот і глобальну гру “Drive to Earn”, за допомогою якої було створено FrodoBots 2K Dataset: різноманітна колекція відео з камер, GPS, аудіо та даних керування людиною, отриманих з ~2 000 годин телеоперації у понад 10 містах.
- BitRobot: створений FrodoBots Lab і Protocol Labs, це крипто-мотиваційна платформа на Solana з архітектурою субмереж. Мета — глобальна співпраця та відкриті інновації у робототехніці й AI. Субмережі є відкритими викликами: учасники можуть надсилати моделі чи дані й отримувати токенізовану винагороду, що стимулює участь і розвиток.
- Reborn Network: Базова екосистема для відкритої мережі AGI-роботів. Reborn пропонує Rebocap — motion capture-костюм, з яким кожен може записати й монетизувати власні рухи, це формує відкриті датасети для розвитку складної гуманоїдної робототехніки.
PrismaX: Децентралізована інфраструктура, яка гарантує справжність і різноманіття даних завдяки глобальній спільноті. Механізми перевірки і винагород дозволяють масштабувати датасети для робототехніки.
Доказ походження й надійності
Блокчейн забезпечує повну прозорість та відповідальність у робототехнічній екосистемі: гарантує походження даних і моделей, верифікує ідентичність і місцезнаходження роботів, зберігає історію операцій та внесків учасників. Сумісна верифікація, ончейн-репутація та stake-based validation підтримують якість та захищають мережу від низькоякісних чи фальсифікованих даних.
Приклад:
OpenLedger: AI-блокчейн-інфраструктура для навчання й розгортання спеціалізованих моделей на спільних датасетах. Використовує Proof of Attribution для справедливої винагороди якісних контриб’юторів даних.
Токенізована власність, ліцензування й монетизація
Web3-native інструменти інтелектуальної власності дозволяють токенізувати ліцензії на датасети, можливості, моделі й агентів. Автори можуть закріплювати ліцензійні умови через смарт-контракти та автоматично отримувати роялті за використання чи монетизацію своїх активів. Це формує відкриті й справедливі ринки даних і моделей у сфері робототехніки.
Приклад:
Poseidon: Децентралізований повнофункціональний data layer, побудований на Story Protocol і інкубований командою Story, для легального ліцензування даних для AI.
Конфіденційні рішення
Дані, отримані у лікарнях, готельних номерах чи приватних будинках, складно одержати з відкритих джерел, проте вони мають надзвичайно багатий контекст, що може значно підвищити якість фундаментальних моделей. Перетворення приватних даних на ончейн-підтверджені активи із криптографічним захистом робить їх відстежуваними, композабельними та монетизованими без втрати приватності. Технології Trusted Execution Environments (TEE) та Zero-Knowledge Proofs (ZKP) дозволяють безпечно обробляти дані й верифікувати результати, не розкриваючи сирі дані. Такі інструменти дають змогу організаціям навчати AI-моделі на чутливих розподілених датасетах із збереженням конфіденційності та відповідності законодавству.
Приклад:
Phala Network: Дозволяє розробникам розгортати додатки у захищених TEE для конфіденційної обробки даних і штучного інтелекту.
Відкрите й відповідальне управління
Тренування роботів найчастіше відбувається у закритих системах без прозорості й гнучкості. Відкрите й перевірене керування критично необхідне для мінімізації ризиків і формування довіри користувачів, регуляторів й бізнесу. Технології Web3 забезпечують ончейн-контроль спільноти й спільний розвиток відкритого коду роботизованого інтелекту.
Приклад:
Openmind: відкритий AI native software stack, що дозволяє роботам мислити, навчатися й співпрацювати. Нещодавно компанія запропонувала ERC7777 — стандарт, що має забезпечити перевірену, регламентовану екосистему роботів з акцентом на безпеку, прозорість і масштабованість. У ньому сформульовано стандартизовані інтерфейси для управління ідентифікацією людини й робота, імплементування соціальних правил й регламентації прав та обов’язків учасників.
Підсумок
Впевнено дивлячись у майбутнє, конвергенція AI-робототехніки та Web3 відкриває нову епоху автономних систем із широкими можливостями для колективної роботи й адаптації. Стрімкий прогрес «заліза» дає змогу у наступні 3–5 років розробити більш потужні AI-моделі, що працюватимуть із масштабними реальними датасетами й децентралізованими протоколами. Очікується поява спеціалізованих AI-агентів у сферах гостинності, логістики, сервісу — це створить нові ринкові можливості.
Втім, попри оптимізм щодо поєднання AI-робототехніки з крипто, перехід супроводжується низкою викликів. Системи мотивації мають бути справедливими, складними та стійкими до зловживань, їх розробка — процес, що ще формуються. Додатково зростає технічна складність, потрібні надійні й масштабовані рішення для інтеграції різних конструкцій роботів. Конфіденційні рішення повинні бути дійсно ефективними, щоб забезпечити довіру спільноти, особливо для чутливих даних. Регуляторні вимоги змінюються швидко, тож важлива обережна навігація для збереження відповідності у різних країнах. Подолання цих ризиків і формування сталого прибутку — необхідна умова успіху й масового впровадження.
Закликаємо до активної участі й обміну досвідом — лише разом ми здатні пришвидшити прогрес і скористатися перевагами нового динамічного ринку.
Інновації у робототехніці — це шлях, який найкраще долати спільно.
Висловлюю окрему вдячність Chain of Thought Robotics & The Age of Physical AI за цінні ідеї, що допомогли в підготовці матеріалу.
Відмова від відповідальності:
- Стаття опублікована з [merakiki.eth]. Всі права належать автору [@merakikieth">merakiki]. У разі заперечень щодо публікації звертайтеся до команди Gate Learn — ваше питання буде оперативно розглянуте.
- Відмова від відповідальності: всі думки та оцінки у матеріалі висловлює автор і вони не є інвестиційною порадою.
- Переклад матеріалу іншими мовами здійснюється командою Gate Learn. За винятком прямих згадок, копіювання, поширення чи плагіат перекладів заборонені.
Поділіться


Пов’язані статті

Що таке крипто-наративи? Топ-наративи на 2025 рік (оновлено)
Що таке OpenLayer? Все, що вам потрібно знати про OpenLayer

Sentient: поєднання найкращих моделей відкритого та закритого штучного інтелекту
Дослідження Smart Agent Hub: Sonic SVM та його масштабний фреймворк HyperGrid
Яка платформа будує найкращих AI-агентів? Ми тестуємо ChatGPT, Claude, Gemini та інші
